Motor driver circuit version 1
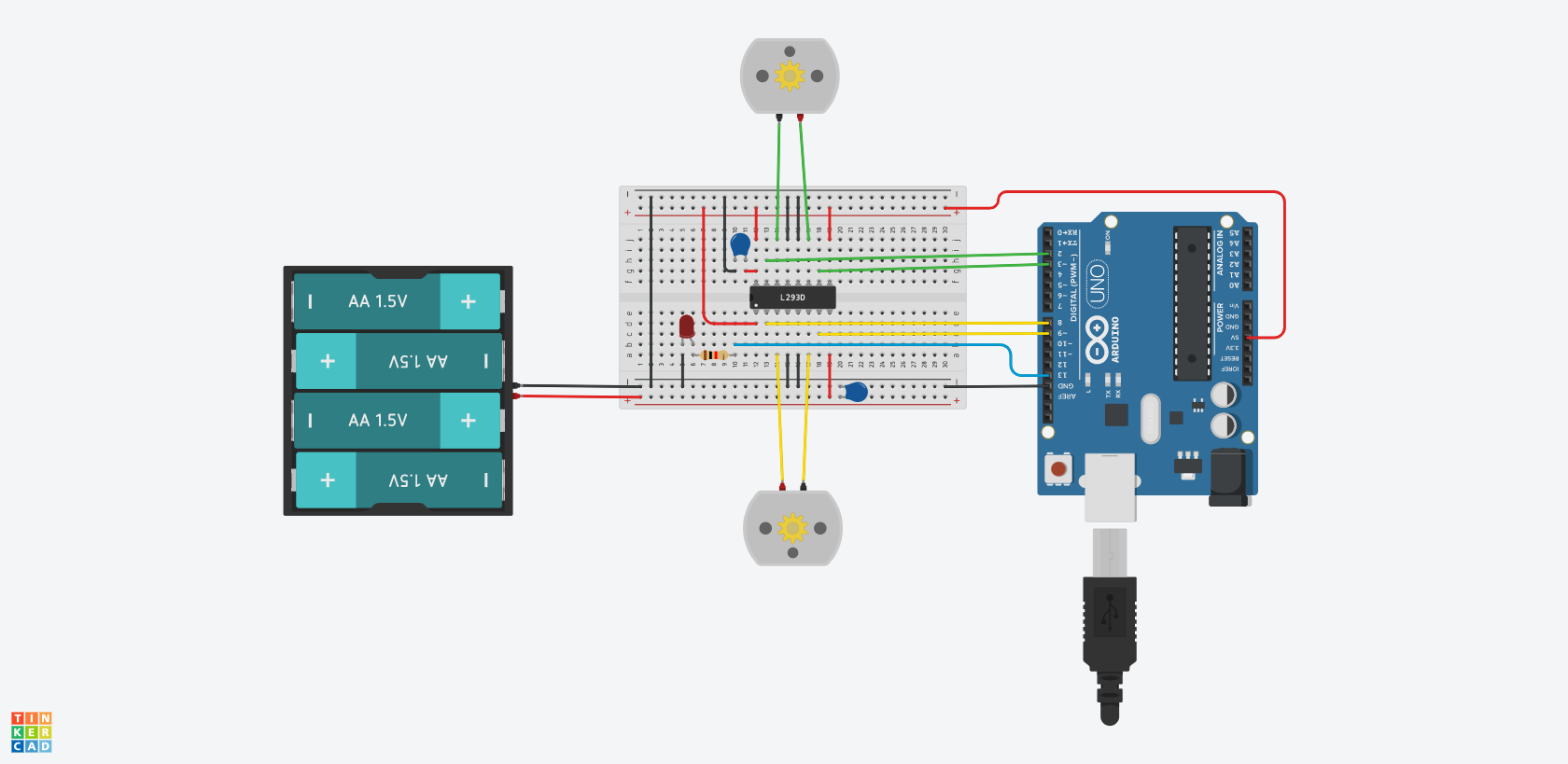
The diagram below shows how to construct a motor driver circuit, and you should be able to follow most of it without any trouble. However, there are also some new elements that you have not seen before. You should apply the same systematic approach as before.
The table below provides a structure and some suggested times for the different stages of the process.
| Stage | Time | Description |
|---|---|---|
| Initial inspection | 2min | Identify those components that you are already familiar with, and also those which are new. Anything new may require special handling. |
| Questions arising | 1 min | Note down your questions as before: make them short but clear. |
| Background research | 5 min | Search for reference material and/or examples online. Remember to take a critical approach, and to compare several possible sources before choosing the ones you will rely on. |
| Answers to questions | 5 min | Take the time to note down your answers. Remember to include links where appropriate, and if any better ideas emerge during discussions, note them down as well. |
| Precautions to be taken | 2 min | Make a note of any special procedures or constraints that you will need to observe, especially with reference to the new elements. |
| Motor driver version 1 | 20 min | Follow the diagram and construct the example circuit as shown. The code below is a simple test program that you can use to show whether your circuit works. |
 DC motors circuit
DC motors circuit
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 | |